Aptiv의 PULSE™ 센서
주차 상황과 도심 밀집 지역을 위한 인식 기술 혁신
지능형 인지를 위한 통합 센서
주차와 저속 주행 환경 맞춤 카메라-레이더 소형 조합
자율 주차와 복잡한 도심 환경에서의 자율주행에는 차량 주변의 물체를 안정적으로 감지하고 운전자에게 경고해줄 수 있는 센서가 필요합니다. Aptiv의 PULSE™ (Parking, Urban, Localization and Surround Enhancement) 센서는 정밀한 감지와 복잡한 주행이 요구되는 도심 및 주차 환경에 최적화된 솔루션입니다.
서라운드 뷰 카메라와 초근거리 레이더의 통합은 차량 주변 360도 영역을 안정적으로 감지할 수 있도록 함과 동시에, 사각지대를 줄이고 비용과 차량 구조의 복잡도를 낮출 수 있습니다.

고성능
Aptiv PULSE™ 센서는 시간과 날씨 조건에 관계없이 주차와 저속 주행의 다양한 시나리오를 안정적으로 지원하는 고성능 감지 솔루션을 제공합니다.

시스템 최적화
서라운드 뷰 카메라와 초근거리 레이더를 하나로 통합함으로써, 비용 절감이 가능해질 뿐만 아니라 차량 아키텍쳐를 단순화할 수 있습니다.

소프트웨어 혁신
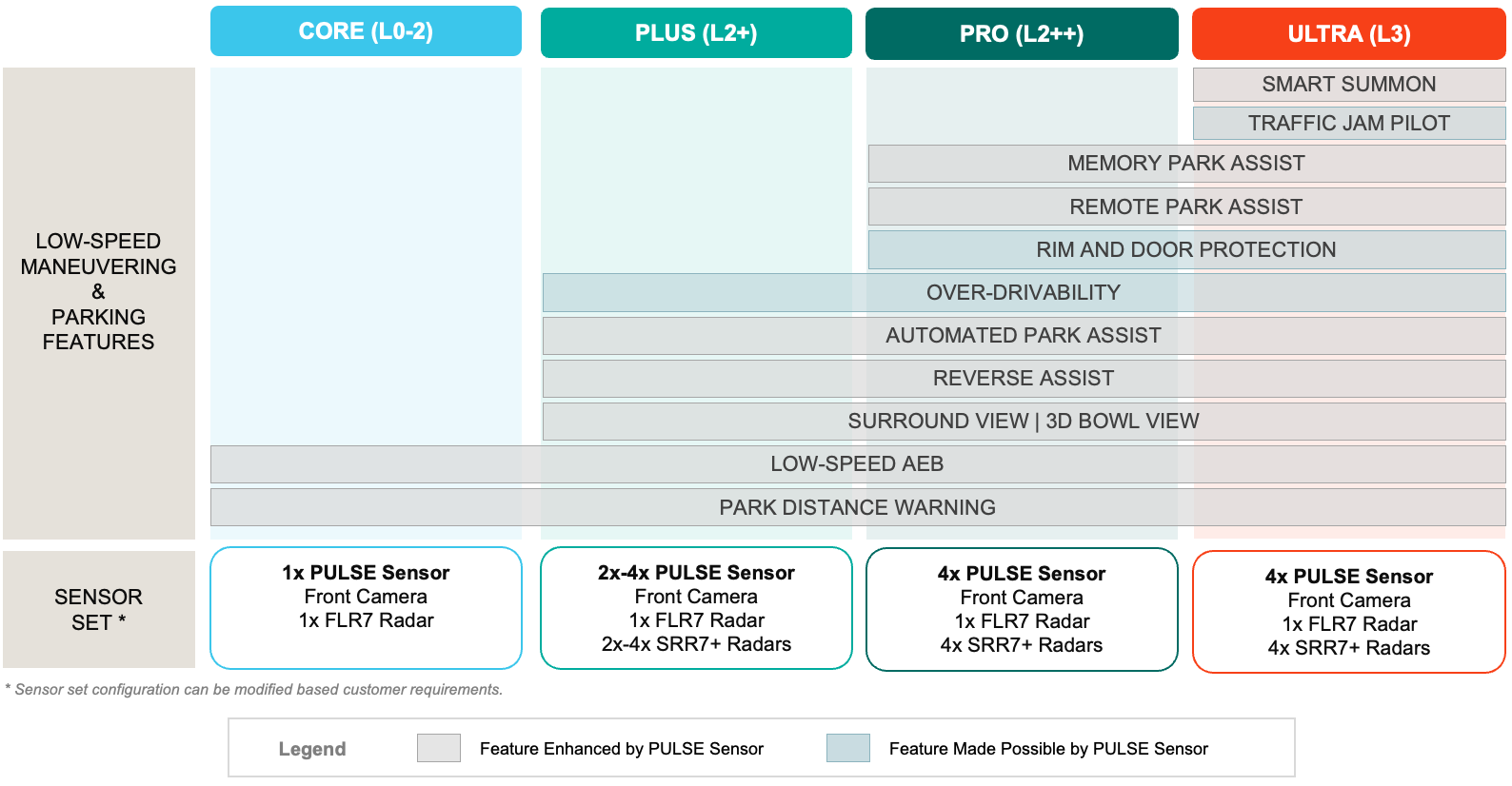
Aptiv의 PULSE™ 센서는 트래픽 잼 파일럿, 좁은 공간이나 복잡한 도심 환경에서 운전자를 지원하는 Over-Drivability 기능 , 휠 및 도어 보호 기능 등 기존 센서로는 구현이 어려운 고급 기능을 가능하게 합니다.
Aptiv PULSE™ 센서가 구현하는 실시간 감지 기술
Aptiv PULSE™는 자율주행 기술의 새로운 혁신을 실현합니다
자율주행 전 단계에 걸쳐 고도화된 소프트웨어 기능 지원
Aptiv PULSE™ 센서 주요 기술 사양
카메라 사양(초기 사양)
화소수
3백만 화소
픽셀 구성(가로 X 세로)
1920 x 1536
셔터
롤링
컬러 필터
RGGB
시야각
200° x 160°
조리개 값
1.46
방수/방진 등급
IP6K9K

레이더 사양(초기 사양)
거리
감지 범위(보행자 기준)
6m
해상도
~ 5cm
속도
감지 범위
+14m/s
- 2.5m/s
- 2.5m/s
정확도
± 0.158m/s
수평 방향
적용 범위
± 75°
분해능
10°
수직 방향
감지 범위
± 60°
분해능
10°
각도 정확도(수평 및 수직)
± 2° @ ± 10°± 4° @ ± 30°± 8° @ ± 55°
패키지 크기(mm3)
35x35x38
주파수 대역
76~81GHz
인터커넥트: 표준 BEV 동축 케이블(FPD-Link 또는 GMSL 또는 ASA)
본 문서의 사양, 치수 및 성능 데이터는 일반적인 참고용으로 사전 고지 없이 변경될 수 있습니다. 제품 정보를 확인하려면 Aptiv 담당자에게 문의하세요.
Aptiv PULSE™ 웨비나 다시보기
Aptiv의 전문가들이 웨비나에서 카메라와 레이더가 통합된 혁신적인 PULSE™ 센서가 어떻게 성능을 개선하고, 시스템 비용을 최적화하며, 기존 ADAS 기능을 강화함과 동시에 새로운 첨단 기능을 어떻게 구현하는지 설명합니다. (시청을 위해 등록이 필요합니다)