지능형 인지를 위한 통합 센서
주차와 저속 주행 환경 맞춤 카메라-레이더 소형 조합
자율 주차와 복잡한 도심 환경에서의 자율주행에는 차량 주변의 물체를 안정적으로 감지하고 운전자에게 경고해줄 수 있는 센서가 필요합니다. Aptiv의 PULSE (Parking, Urban, Localization and Surround Enhancement) 센서는 정밀한 감지와 복잡한 주행이 요구되는 도심 및 주차 환경에 최적화된 솔루션입니다.
서라운드 뷰 카메라와 초근거리 레이더의 통합은 차량 주변 360도 영역을 안정적으로 감지할 수 있도록 함과 동시에, 사각지대를 줄이고 비용과 차량 구조의 복잡도를 낮출 수 있습니다.

고성능
Aptiv PULSE 센서는 시간과 날씨 조건에 관계없이 주차와 저속 주행의 다양한 시나리오를 안정적으로 지원하는 고성능 감지 솔루션을 제공합니다.

시스템 최적화
서라운드 뷰 카메라와 초근거리 레이더를 하나로 통합함으로써, 비용 절감이 가능해질 뿐만 아니라 차량 아키텍쳐를 단순화할 수 있습니다.

소프트웨어 혁신
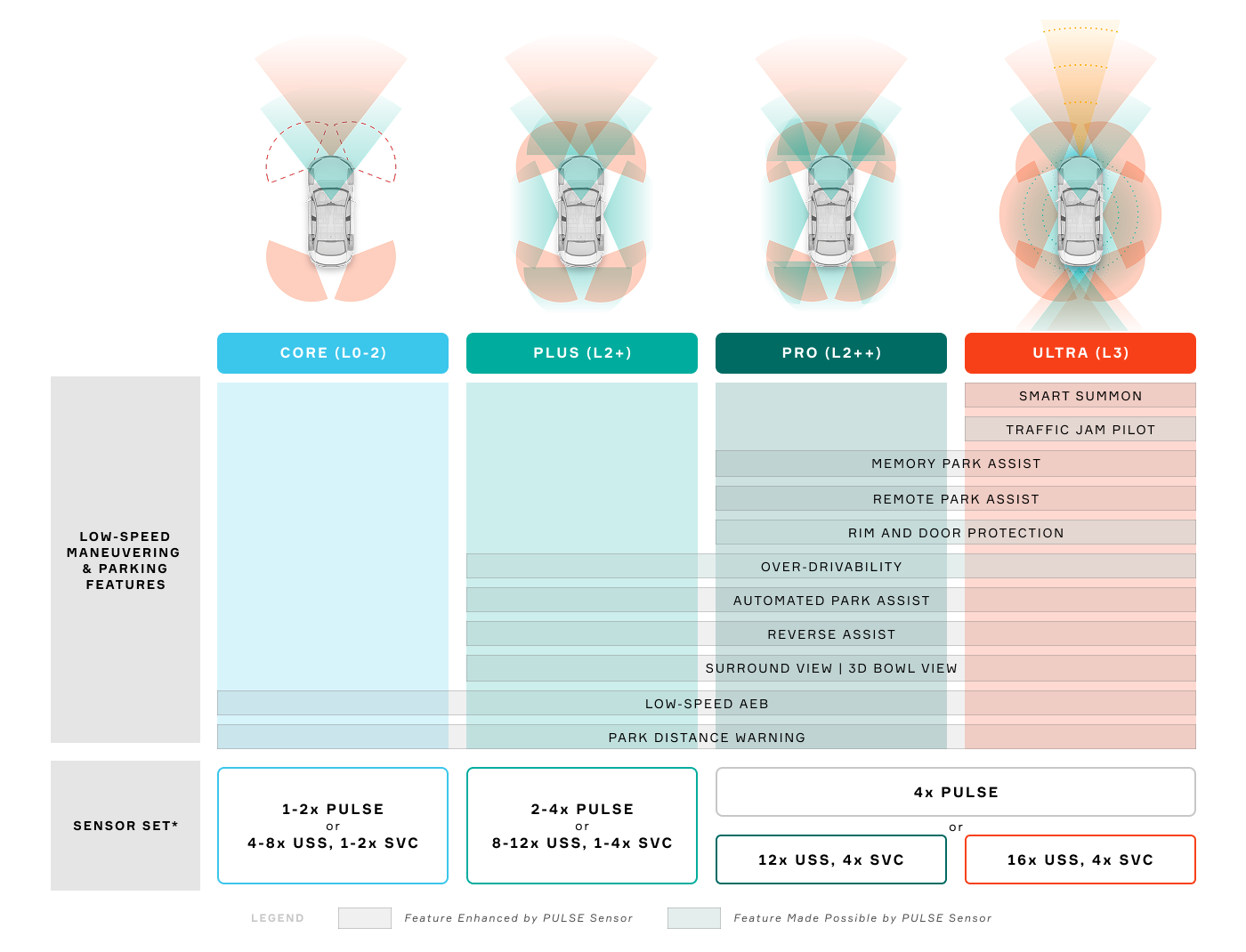
Aptiv의 PULSE 센서는 트래픽 잼 파일럿, 좁은 공간이나 복잡한 도심 환경에서 운전자를 지원하는 Over-Drivability 기능 , 휠 및 도어 보호 기능 등 기존 센서로는 구현이 어려운 고급 기능을 가능하게 합니다.
Aptiv PULSE는 자율주행 기술의 새로운 혁신을 실현합니다
자율주행 전 단계에 걸쳐 고도화된 소프트웨어 기능 지원
Aptiv PULSE 센서 주요 기술 사양

사양, 치수 및 성능 데이터는 변경될 수 있습니다.
Aptiv PULSE 웨비나 다시보기
Aptiv의 전문가들이 웨비나에서 카메라와 레이더가 통합된 혁신적인 PULSE 센서가 어떻게 성능을 개선하고, 시스템 비용을 최적화하며, 기존 ADAS 기능을 강화함과 동시에 새로운 첨단 기능을 어떻게 구현하는지 설명합니다. (시청을 위해 등록이 필요합니다)