What Is a Domain Controller?
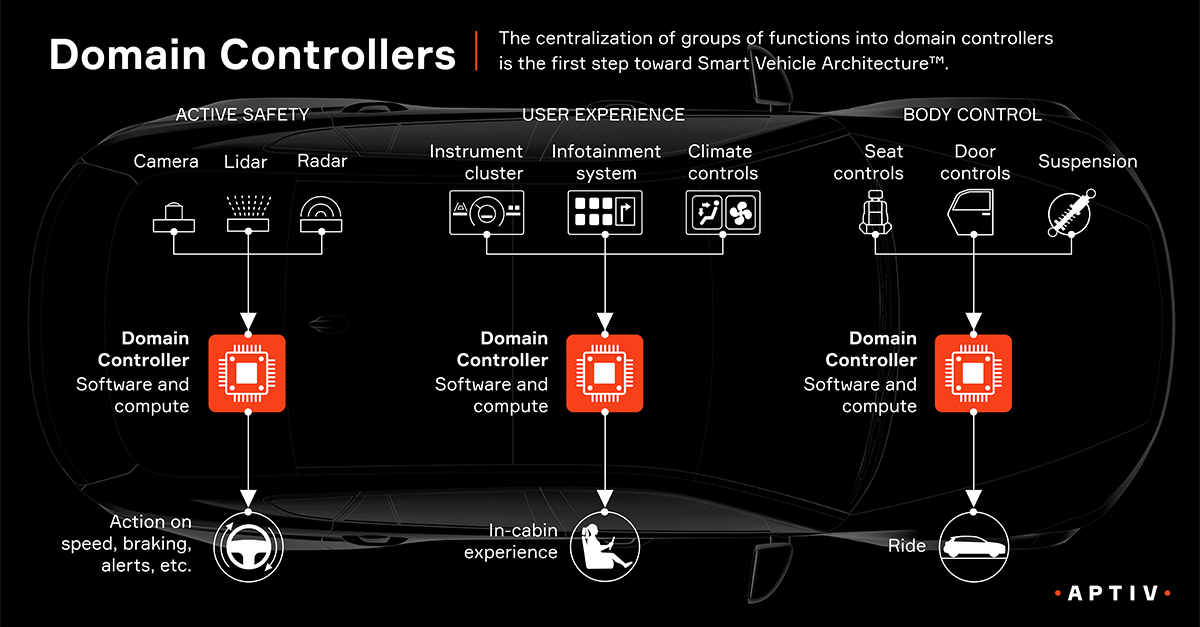
In automotive applications, a domain controller is a computer that controls a set of vehicle functions related to a specific area, or domain. Functional domains that require a domain controller are typically compute-intensive and connect to a large number of input/output (I/O) devices. Examples of relevant domains include active safety, user experience, and body and chassis.
Centralization of functions into domain controllers is the first step in vehicles’ evolution toward advanced electrical/electronic architectures, such as Aptiv’s Smart Vehicle Architecture™.
An active safety domain controller receives inputs from sensors around the vehicle, such as radars and cameras, and uses that input to create a model of the surrounding environment. Software applications in the domain controller then make “policy and planning” decisions about what actions the vehicle should take, based on what the model shows. For example, the software might interpret images sent by the sensors as a pedestrian about to step onto the road ahead and, based on predetermined policies, cause the vehicle to either alert the driver or apply the brakes.
In the area of user experience, a domain controller typically controls multiple elements of the in-cabin experience — for example, providing the software and computing power needed to run the infotainment system, driver cluster and other vehicle interfaces for the user. These interfaces are increasingly accomplished through dynamic, reconfigurable displays, such as a touchscreen that can provide navigation, audio controls and climate functions.
A step toward the future
Domain controllers represent an important milestone toward more software-defined vehicles and centralization.
Functions that have previously been handled through individual electronic control units ( ECUs) can be consolidated, or up-integrated, into domain controllers. For example, a radar might previously have had its processing done in a self-contained ECU; however, that processing could move to an active safety domain controller through a Satellite Architecture approach.
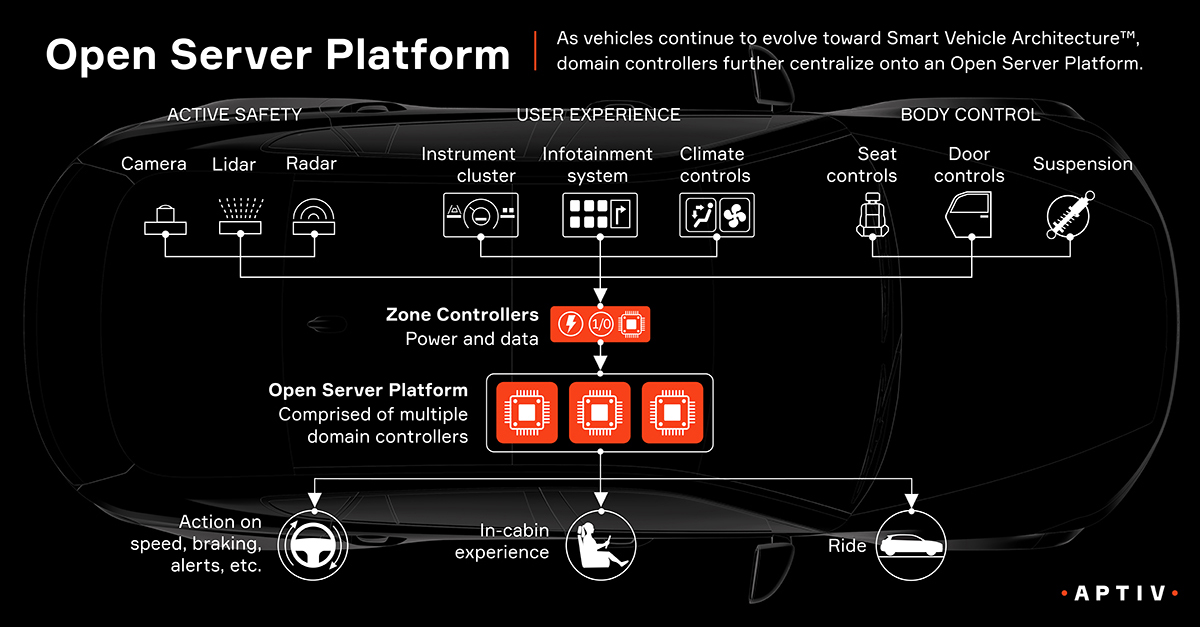
Domain controllers are further complemented by zone controllers. Zone controllers are nodes in the vehicle that serve as hubs for power distribution and data connection. They handle the I/O with sensors, actuators and peripherals, which abstracts the I/O from the compute and frees a domain controller to focus on software that performs higher-level functions.
Eventually, domain controllers will consolidate further into “serverized” controllers. With I/O abstracted from compute and a high-speed network in place, it makes sense to consolidate the software in the domain controllers onto fewer computers capable of dynamically sharing workloads among the different domains. This centralization will further reduce cost and space, unlock new functionality such as driver-out-of-the-loop automation, and make it easier to perform over-the-air updates of the software.
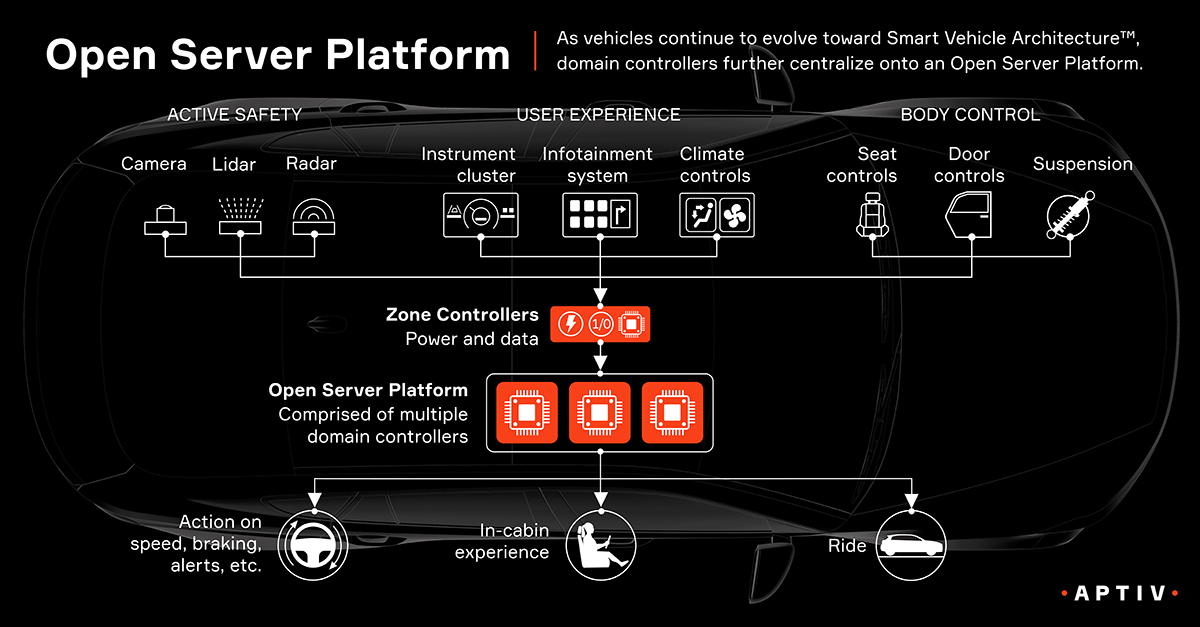
This approach will become possible as software is increasingly abstracted from hardware, a key tenet of Aptiv’s Smart Vehicle Architecture (SVA™) vision. With that abstraction, multidomain controllers can be recast as an Open Server
Platform.
An Open Server Platform allows developers from the OEM, Aptiv and approved third parties to build innovative applications and collaborate on software in ways never before possible. As vehicles move up the levels of automated driving and take on more driving tasks, powerful, centralized and fail-operational compute becomes increasingly important.
Aptiv anticipated this shift to centralization more than 10 years ago and was first in the industry to introduce a domain controller to perform those tasks. We understand the challenges that come with developing higher-level driving functions, and our unique view of the brain and nervous system of the vehicle allows us to effectively anticipate the hardware and software needs to come.


{kind=link}
{kind=link}