What Are Operational Design Domains?
In the automotive industry, operational design domains (ODDs) define the operating conditions under which a vehicle’s automated driving systems can be safely engaged.
Each ODD is specific to the vehicle model and the feature. Within a single vehicle brand, models have varying levels of automated driving capabilities and will therefore have different ODDs.
What are ODD criteria?
Some commonly cited ODD criteria include road features, time of day, weather and terrain. For example, a hands-free driving feature might be designed to operate during the day but not at night, on a clear day but not in heavy rain or fog, or on a relatively straight stretch of highway but not in a confined urban setting.
The graphic below shows the broad range of categories that the National Highway Traffic Safety Administration (NHTSA) uses as part of its ODD taxonomy to organize and identify various ODDs. This list is not exhaustive, however, and many more categories might also be used to define an ODD.
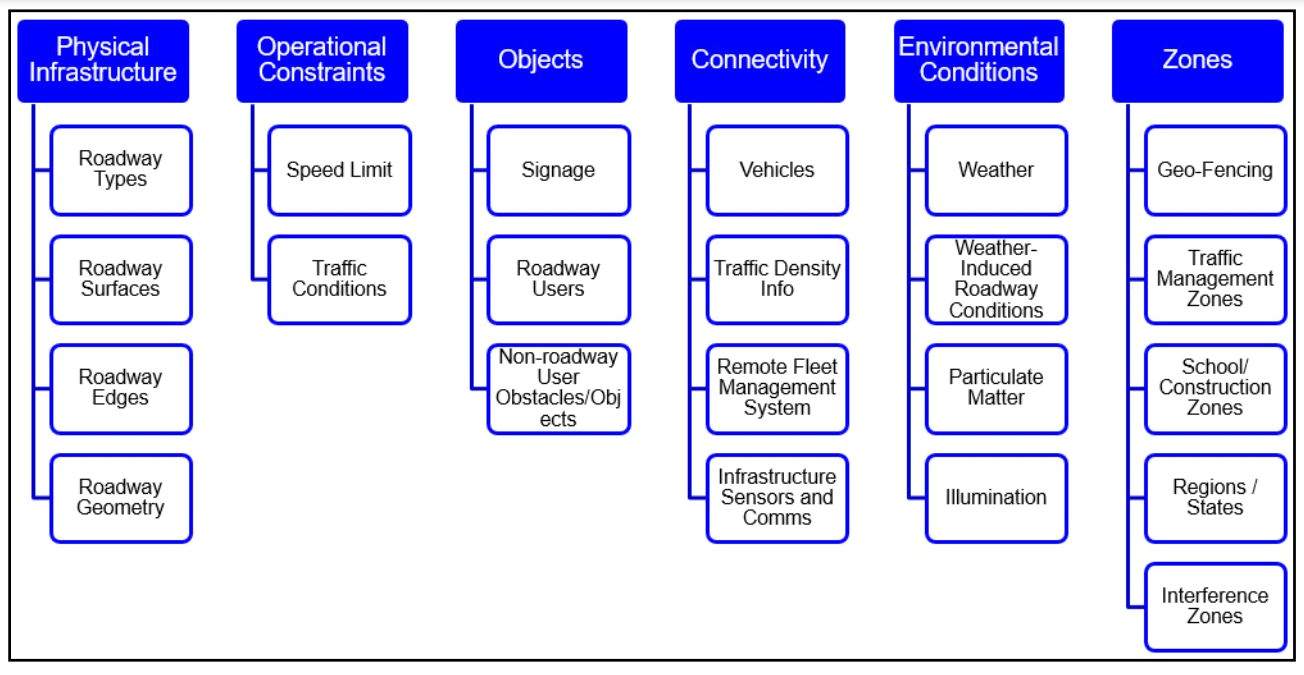 NHTSA includes six top-level categories and numerous subcategories to define an ODD.
NHTSA includes six top-level categories and numerous subcategories to define an ODD.
Increasing adoption and usage of ODD-dependent driving systems
The NHTSA is one of many regulatory bodies with standards regarding ODD taxonomy. However, there is currently no industry-wide standard used at the international level, leaving it up to individual manufacturers and suppliers to implement a consistent approach.
Given its role in the safe operation of automated features, the intended ODD must be clearly defined during the design requirements phase to ensure technology suppliers can appropriately design subsystems and components to achieve the desired performance cost-effectively. Further, transparently communicating the conditions under which these features are intended to work — to both vehicle operators and regulators — can help both groups better anticipate potential challenges.
There is also a growing focus on ODD as a form of differentiation. Expanding the use cases where a vehicle’s automated driving system can safely operate makes it more appealing to end consumers. However, the extent to which the vehicle operator understands the feature’s ODD impacts its adoption rate. Educating the consumer on a feature’s ODDs is essential — both to ensure the system is operated within its intended limits and to increase its adoption by consumers.
Expanding usability within the ODD
Until autonomous systems are able to account for every situation, every environment and every circumstance, drivers must keep in mind that human intervention continues to be essential to vehicle operation.
Today, many OEMs are integrating Level 2+ advanced partial automation (hands off, eyes on) and Level 3 conditional automation (hands off, eyes off) into their vehicles. As vehicles approach higher levels of automated driving, clearly defined ODDs provide the rules of the road that determine when and how vehicle control should be handed off between the driver and the vehicle. If the vehicle is leaving the ODD or the conditions change to exceed the ODD, then the vehicle must re-engage the driver and seamlessly pass control of the vehicle back to them.
Aptiv’s advanced driver-assistance systems provide OEMs with the end-to-end platform needed to support the implementation of clearly defined ODDs up to Level 3 automated driving. For example, our first-generation ADAS platform on the Jeep Grand Cherokee was one of three high-content Aptiv systems to earn top marks in a recent independent, third-party study, scoring the highest in multiple categories and being highlighted for its strong value. Our situational-awareness estimation model combines environment-sensing and driver-sensing data to better understand the quality of a driver’s situational awareness as they attempt to regain control — enabling the vehicle to highlight specific objects that are potential threats and to inform the driver where they should direct their gaze. Building sophisticated models of the driver and the environment is essential to achieve a safe and collaborative driver-vehicle relationship.
